|
|

|

|
| e-Pub |
Section: New Results
3D object and scene modeling, analysis, and retrieval
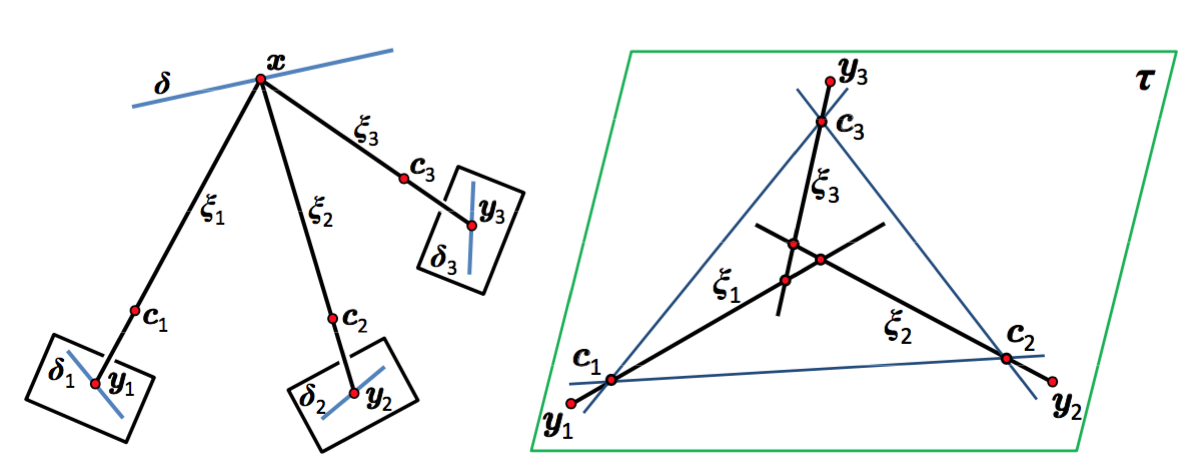
Trinocular Geometry Revisited
Participants : Jean Ponce, Martial Hebert, Matthew Trager.
When do the visual rays associated with triplets of point correspondences converge, that is, intersect in a common point? Classical models of trinocular geometry based on the fundamental matrices and trifocal tensor associated with the corresponding cameras only provide partial answers to this fundamental question, in large part because of underlying, but seldom explicit, general configuration assumptions. In this project, we use elementary tools from projective line geometry to provide necessary and sufficient geometric and analytical conditions for convergence in terms of transversals to triplets of visual rays, without any such assumptions. In turn, this yields a novel and simple minimal parameterization of trinocular geometry for cameras with non-collinear or collinear pinholes, which can be used to construct a practical and efficient method for trinocular geometry parameter estimation. This work has been published at CVPR 2014, and a revised version that includes numerical experiments using synthetic and real data has been published in IJCV [7] and example results are shown in figure 1.
|
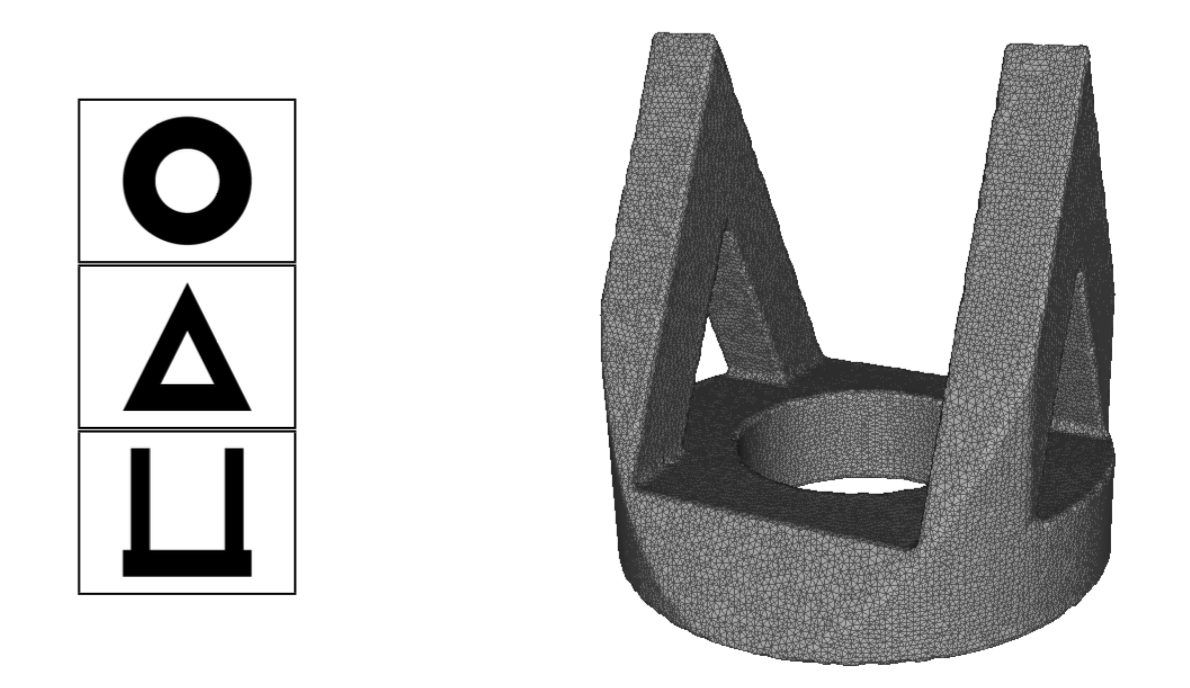
Consistency of silhouettes and their duals
Participants : Matthew Trager, Martial Hebert, Jean Ponce.
Silhouettes provide rich information on three-dimensional shape, since the intersection of the associated visual cones generates the "visual hull", which encloses and approximates the original shape. However, not all silhouettes can actually be projections of the same object in space: this simple observation has implications in object recognition and multi-view segmentation, and has been (often implicitly) used as a basis for camera calibration. In this paper, we investigate the conditions for multiple silhouettes, or more generally arbitrary closed image sets, to be geometrically "consistent". We present this notion as a natural generalization of traditional multi-view geometry, which deals with consistency for points. After discussing some general results, we present a "dual" formulation for consistency, that gives conditions for a family of planar sets to be sections of the same object. Finally, we introduce a more general notion of silhouette "compatibility" under partial knowledge of the camera projections, and point out some possible directions for future research. This work has been published in [16] and example results are shown in 2.
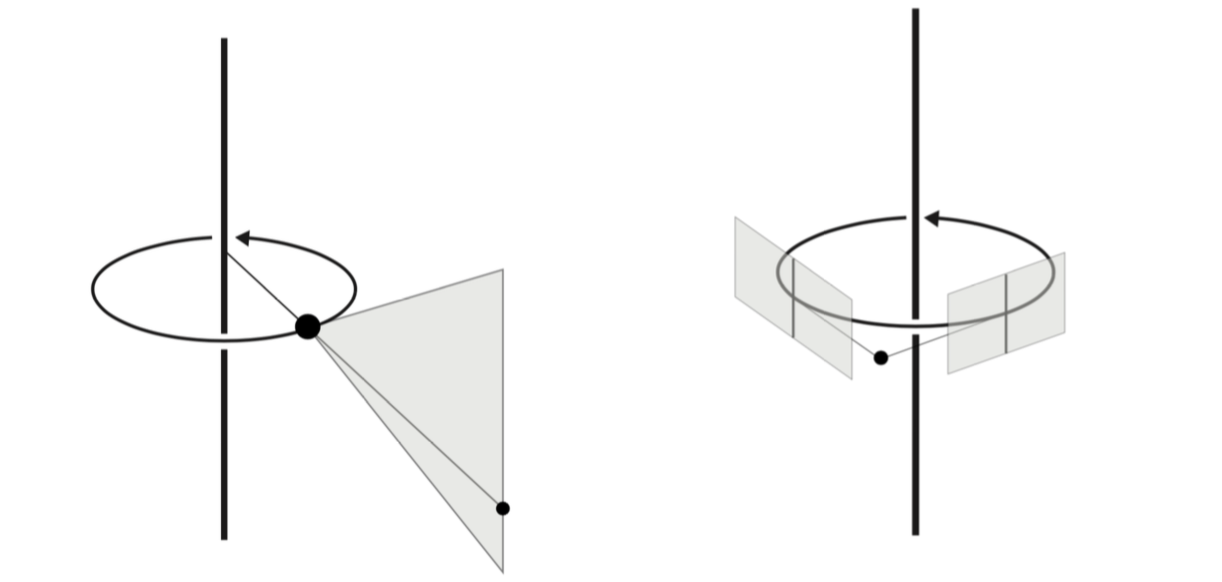
Congruences and Concurrent Lines in Multi-View Geometry
Participants : Jean Ponce, Bernd Sturmfels, Matthew Trager.
We present a new framework for multi-view geometry in computer vision. A camera is a mapping between and a line congruence. This model, which ignores image planes and measurements, is a natural abstraction of traditional pinhole cameras. It includes two-slit cameras, pushbroom cameras, catadioptric cameras, and many more. We study the concurrent lines variety, which consists of n-tuples of lines in that intersect at a point. Combining its equations with those of various congruences, we derive constraints for corresponding images in multiple views. We also study photographic cameras which use image measurements and are modeled as rational maps from to or . This work has been accepted for publication in [19] and example results are shown in 3.
|
NetVLAD: CNN architecture for weakly supervised place recognition
Participants : Relja Arandjelović, Petr Gronat, Akihiko Torii, Tomas Pajdla, Josef Sivic.
In [9], we tackle the problem of large scale visual place recognition, where the task is to quickly and accurately recognize the location of a given query photograph. We present the following three principal contributions. First, we develop a convolutional neural network (CNN) architecture that is trainable in an end-to-end manner directly for the place recognition task. The main component of this architecture, NetVLAD, is a new generalized VLAD layer, inspired by the "Vector of Locally Aggregated Descriptors" image representation commonly used in image retrieval. The layer is readily pluggable into any CNN architecture and amenable to training via backpropagation. Second, we develop a training procedure, based on a new weakly supervised ranking loss, to learn parameters of the architecture in an end-to-end manner from images depicting the same places over time downloaded from Google Street View Time Machine. Finally, we show that the proposed architecture obtains a large improvement in performance over non-learnt image representations as well as significantly outperforms off-the-shelf CNN descriptors on two challenging place recognition benchmarks. This work has been published at CVPR 2016 [9]. Figure 4 shows some qualitative results.
|

Pairwise Quantization
Participants : Artem Babenko, Relja Arandjelović, Victor Lempitsky.
We consider the task of lossy compression of high-dimensional vectors through quantization. We propose the approach that learns quantization parameters by minimizing the distortion of scalar products and squared distances between pairs of points. This is in contrast to previous works that obtain these parameters through the minimization of the reconstruction error of individual points. The proposed approach proceeds by finding a linear transformation of the data that effectively reduces the minimization of the pairwise distortions to the minimization of individual reconstruction errors. After such transformation, any of the previously-proposed quantization approaches can be used. Despite the simplicity of this transformation, the experiments demonstrate that it achieves considerable reduction of the pairwise distortions compared to applying quantization directly to the untransformed data. This work has been published on arXiv [18] and submitted to Neurocomputing journal.
Learning and Calibrating Per-Location Classifiers for Visual Place Recognition
Participants : Petr Gronat, Josef Sivic, Guillaume Obozinski [ENPC / Inria SIERRA] , Tomáš Pajdla [CTU in Prague] .
The aim of this work is to localize a query photograph by finding other images depicting the same place in a large geotagged image database. This is a challenging task due to changes in viewpoint, imaging conditions and the large size of the image database. The contribution of this work is two-fold. First, we cast the place recognition problem as a classification task and use the available geotags to train a classifier for each location in the database in a similar manner to per-exemplar SVMs in object recognition. Second, as only few positive training examples are available for each location, we propose a new approach to calibrate all the per-location SVM classifiers using only the negative examples. The calibration we propose relies on a significance measure essentially equivalent to the p-values classically used in statistical hypothesis testing. Experiments are performed on a database of 25,000 geotagged street view images of Pittsburgh and demonstrate improved place recognition accuracy of the proposed approach over the previous work. This work has been published at CVPR 2013, and a revised version that includes additional experimental results has been published at IJCV [3].